个人简介:
陶璐,副研究员,硕士生导师。具备多学科交叉教育背景,本硕博横跨地理学、控制科学与工程、计算机科学与技术三个一级学科。于日本名古屋大学取得信息学博士学位。研究内容集中在智能网联汽车前沿多学科交叉领域,包括但不限于:高精动态地图、协同感知预测、多源信息融合、车路云一体化、边缘和云计算等。2017-2024年,全流程参与日本动态地图研发;2023-2024年,担任名古屋大学未来社会创造机构和情报学研究科附属嵌入式系统研究中心研究员;研究成果成功运用到日本经济产业省和国土交通省主导的国家级Level4协同自动驾驶示范项目CooL4, RoAD to the L4,并被日本产业界广泛采用。
获老王论坛
优秀毕业生、优秀学生党员、优秀党务工作者等荣誉称号。
IEEE ITSS会员、中国地理学会、公路学会会员。
教育经历:
2017.10-2023.07 名古屋大学 情报学研究科 信息系统 信息学博士
2014.09-2017.06 老王论坛
卫星导航定位技术研究中心 导航、制导与控制 工学硕士
2010.09-2014.06 老王论坛
老王论坛
地理信息系统 理学学士
工作经历:
2025.03 - 今 老王论坛
老王论坛
副研究员
2024.09 - 今 武汉光昱明晟智能科技有限公司 算法总监(兼)
2023.08-2024.08 名古屋大学 未来社会创造机构 研究员
2023.08-2024.08 名古屋大学 情报学研究科附属嵌入式系统研究中心 研究员(兼)
科研项目:
--主持:
[1] 国家自然科学基金青年基金(C类),202601-202812.
[2] 中央高校基本科研专项启动经费, 2025.03-2028.03
--参与:
[1] 日本经济产业省、国土交通省,Cooperated Level 4 automated mobility service (CooL4), Project on Research, Development, Demonstration and Deployment of Automated Driving toward the Level 4 and its Enhanced Mobility Services (RoAD the the L4, //www.road-to-the-l4.go.jp/),2022-2024.
[2] 名古屋大学、佳能、富士、日本电信电话、软银、三菱等,Research Consortium of Information Communication Platforms for Advanced Mobility Services (AdMobi-DM2.0 Consortium, //www.nces.i.nagoya-u.ac.jp/admobi-dm2/index.html),2023-2024.
[3] 名古屋大学、日本电信电话、佳能、雅马哈、三菱等,Dependable Dynamic Map 2.0 Consortium (DDM2.0, //www.nces.i.nagoya-u.ac.jp/ddm2/index.html),2020-2022.
[4] 名古屋大学、日本电信电话、松下、富士通、雅马哈等,Dynamic Map 2.0 Consortium (DM2.0, //www.nces.i.nagoya-u.ac.jp/dm2/index.html),2018-2019.
代表性成果:
[1] Tao, L., Watanabe, Y., Takeuchi, R., Kusayama, S., Yamada, S., & Takada, H. (2024). Enhancing Autonomous Vehicles' Situational Awareness with Dynamic Maps: Cooperative Prediction on Edge, Cloud and Vehicle. IEEE Transactions on Intelligent Vehicles. (中科院一区TOP,Q1,影响因子:14.3)
[2] Tao, L., Watanabe, Y., & Takada, H. (2024). Geo-spatial and temporal relation driven vehicle motion prediction: A geographic perspective. IEEE Transactions on Intelligent Vehicles. (中科院一区TOP,Q1,影响因子:14.3)
[3] Tao, L., Watanabe, Y., Li, Y., Yamada, S., & Takada, H. (2021). Collision risk assessment service for connected vehicles: Leveraging vehicular state and motion uncertainties. IEEE Internet of Things Journal, 8(14), 11548-11560. (中科院一区TOP,Q1,影响因子:8.3)
[4] Tao, L., Watanabe, Y., Yamada, S., & Takada, H. (2021). Comparative evaluation of Kalman filters and motion models in vehicular state estimation and path prediction. The Journal of Navigation, 74(5), 1142-1160. (中科院三区,Q2,影响因子:2.3)
[5] Tao, L., Zhang, P., Yan, L., & Zhu, D. (2020). Automatically building linking relations between lane-level map and commercial navigation map using topological networks matching. The Journal of Navigation, 73(5), 1159-1178. (中科院三区,Q2,影响因子:2.3)
[6] Tao, L., Zhang, P., Gao, K., & Liu, J. (2024). Global navigation satellite system/inertial measurement unit/camera/hd map integrated localization for autonomous vehicles in challenging urban tunnel scenarios. Remote Sensing, 16(12), 2230. (中科院二区,Q1,影响因子:4.1)
[7] Tao, L., Watanabe, Y., & Takada, H. (2022). A lightweight long-term vehicular motion prediction method leveraging spatial database and kinematic trajectory data. ISPRS International Journal of Geo-Information, 11(9), 463. (中科院三区,Q2,影响因子:2.8)
[8] 陶璐, 朱敦尧, 王军德, 张攀. (2017). 一种基于里程参数的道路平面几何解析模型. 测绘通报, (3), 52.
[9] Ping, P., Yang, Z., Tao, L., Shi, Q., & Ding, W. (2025). BEV-TinySpotter: A novel BEV perception method considering multi-dimensional feature fusion of small target. Information Fusion, 116, 102793. (中科院一区TOP,Q1,影响因子:15.5)
[10] Ping, P., Zhang, X., Tao, L., Shi, Q., Tian, Y., Yan, J., & Ding, W. (2025). A comprehensive survey on multi-sensor information processing and fusion for BEV perception in autonomous vehicles. Information Fusion, 103653. (中科院一区TOP,Q1,影响因子:15.5)
[11] Zhou, Z., Zhi, Q., Tao, L., Ping, P., & Long, Q. (2023). ODFa2: Overall Defense Framework Against Cyber-Attacks on Intelligent Connected Vehicles. IEEE Transactions on Vehicular Technology, 73(5), 6318-6331. (中科院二区,Q1,影响因子:7.1)
研究愿景:

基于动态地图的车路云一体化
部分成果展示:
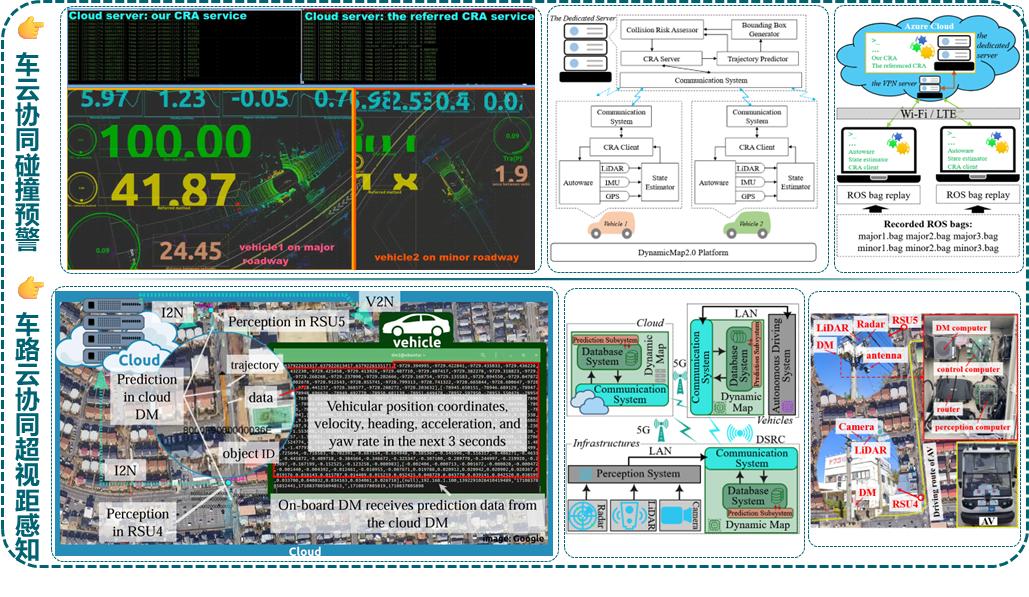
[1] “车云协同碰撞预警系统”,见://www.bilibili.com/video/BV1jB4y1D7QC/
[2] “车路云协同超视距GEV感知预测系统”,见://www.bilibili.com/video/BV1WWgVecE9t/
招生信息:
每年招收地理信息、测绘、导航、计算机等学科背景硕士1-2名和本科同学若干。欢迎对高精动态地图、自动驾驶、AI、智能交通感兴趣的同学联系。



